Восстановление линейной функции одним нейроном¶
Искусственный нейрон¶
В прошлой статье говорилось о модели, имеющей набор параметров \theta, который нам необходимо оптимизировать, чтобы минимизировать функцию ошибки J(\theta). Когда речь идёт о глубоком обучении, под такими моделями понимают сами искусственные нейронные сети, которые состоят из узлов - нейронов.
Математически искусственный нейрон обычно представляют как некоторую нелинейную функцию от единственного аргумента — линейной комбинации всех входных сигналов - сигнал от которой посылается на единственный выход. На рисунке 1 наглядно представлена схема искусственного нейрона:
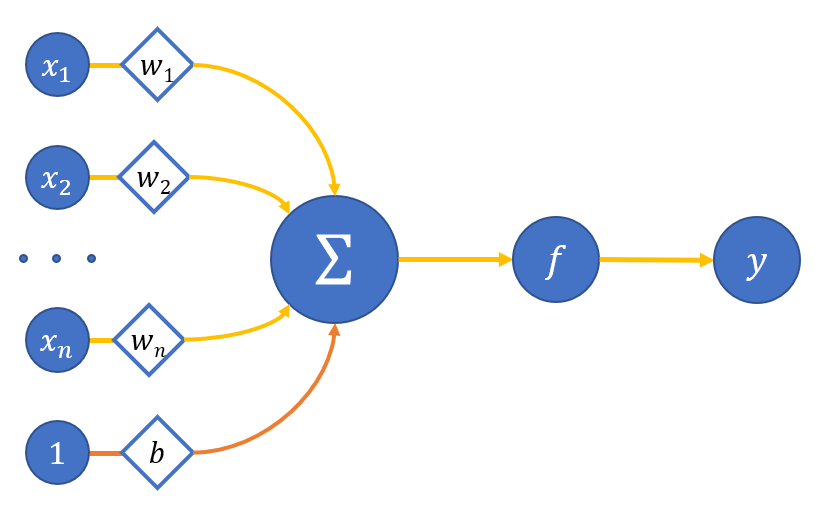
где
x_0,...,x_n - входы нейрона;
w_o,..w_n - веса соответствующих входов;
b - вес смещения (принимаем вход этой связи равным единице);
\sum - сумматор взвешенных входов;
f - функция активации нейрона;
y - выход нейрона.
В итоге получается, что выход нейрона выглядит так:
или если обозначить вес смещения как w_0, а значение входа x_0:
Функция активации может быть, например, такой, что она будет давать на выходе 1, если линейная комбинация всех нейронов превышает какое-то значение, и 0 в обратном случае.
Если в качестве модели, о которой говорилось выше, мы возьмём один такой нейрон, то его веса и будут теми самыми параметрами модели \theta.
Давайте для простоты рассмотрим модель упрощённого нейрона с одним входом и без функции активации (пока что) - рисунок 2:
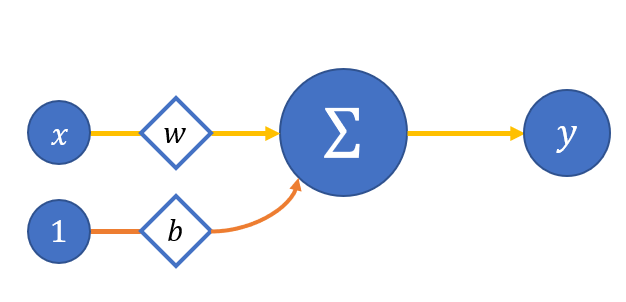
Тогда:
что подозрительно напоминает уравнение прямой. Так давайте её и будем восстанавливать.
Для этого, как говорилось, необходимо решить оптимизационную задачу:
Возьмём в качестве функции ошибки среднеквадратичную (двойка в знаменателе добавляется для удобства последующего дифференцирования):
где
N - количество объектов в выборке;
y_i - реальное значение для i-го объекта;
y_i^p - предсказанное моделью значение для i-го объекта.
Вспомним, как оптимизируются параметры:
или для случая с упрощённым нейроном:
Как найти \nabla_{w}{J_i(w_t, b_t)} и \nabla_{w}{J_i(w_t, b_t)}? Необходимо просто взять частные производные функции ошибки от этих параметров, которые, в свою очередь, будут производными сложной функции:
Для выбранной функции ошибки имеем следующие аналитические выражения:
Тогда обновление параметров искусственного нейрона происходит следующим образом:
Ну что же, пора всё это воплотить в коде.
Упрощённый нейрон в коде¶
Для начала импортируем всё, что нам понадобится - это numpy для работы с тензорами, matplotlib.pyplot для построения графиков и напишем функции show и showSubplots для отображения графиков на экране:
import numpy as np
import matplotlib.pyplot as plt
def show(x, y, pred=None, title=None):
plt.plot(x, y, linewidth=5, color="black", antialiased=True, label="True values")
if pred is not None:
plt.plot(x, pred, linewidth=2, color="orange", antialiased=True, label="Predicted values")
if title is not None:
plt.title(f'{title}')
plt.legend()
plt.show()
def showSubplots(x, y, *args, title=None):
fig = plt.figure(1, figsize=[10.4, 4.8])
for i, arg in enumerate(args):
i += 1
ax = fig.add_subplot(int("12{}".format(i)))
ax.plot(x, y, linewidth=5, color="black", antialiased=True, label="True values")
yp = arg["y"]
name = arg["name"]
color = arg["color"]
ax.plot(x, yp, linewidth=2, color=color, antialiased=True, label="{}".format(name))
ax.legend()
if title is not None:
fig.suptitle(f'{title}')
fig.show()
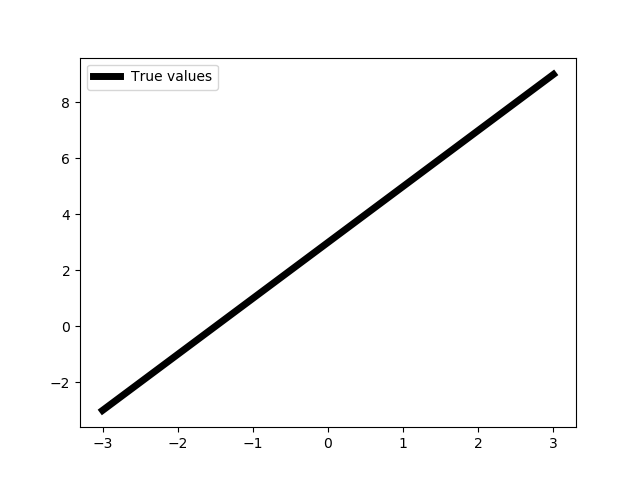
Далее зададим множество аргументов нашей линейной функции и саму эту функцию:
X = np.linspace(-3, 3, 1000, dtype=np.float32).reshape(-1, 1)
def func(x):
return 2 * x + 3
f = np.vectorize(func)
Y = f(X)
show(X, Y)
Тип данных np.float32 не обязателен для нас сейчас, но понадобится в будущем.
Создадим простенькую реализацию выбранной функции ошибки - среднеквадратичной ошибки:
class Error:
@staticmethod
def value(true, pred):
return 0.5 * np.mean((true - pred) ** 2)
@staticmethod
def grad(true, pred):
c = 1 / np.prod(true.shape)
return -(true - pred) * c
c - коэффициент среднего, обратный количеству объектов в выборке.
Наконец сам класс искусственного нейрона:
class Neuron:
def __init__(self):
self.w = 1
self.b = 0
self.inData = None
self.data = None
self.grad = None
def __call__(self, data):
return self.forward(data)
def forward(self, data):
self.inData = data
self.data = data * self.w + self.b
return self.data
def backward(self, grad):
self.grad = grad
def update(self, lr=0.1):
self.w -= self.inData * self.grad * lr
self.b -= self.grad * lr
def optimize(self, data, target, lr):
prediction = self(data)
# print("Neuron error {}".format(Error.value(target, prediction)))
grad = Error.grad(target, prediction)
self.backward(grad)
self.update(lr)
Объясним методы:
forward- прямой прогон данных через нейрон; нам необходимо здесь запоминать в атрибутах класса входящие данные, потому что они понадобятся при оптимизации параметров (см. x в формуле обновления весов выше);backward- задел на будущее, пока что просто сохраняем пришедший градиент от функции ошибки в атрибутах класса;update- обновление параметров нейрона по вышеприведённой формуле;optimize- метод, объединяющий в себе все необходимые операции для оптимизации параметров нейрона;lr- learning rate.
Можно переходить к обучению нейрона.
Обучение нейрона¶
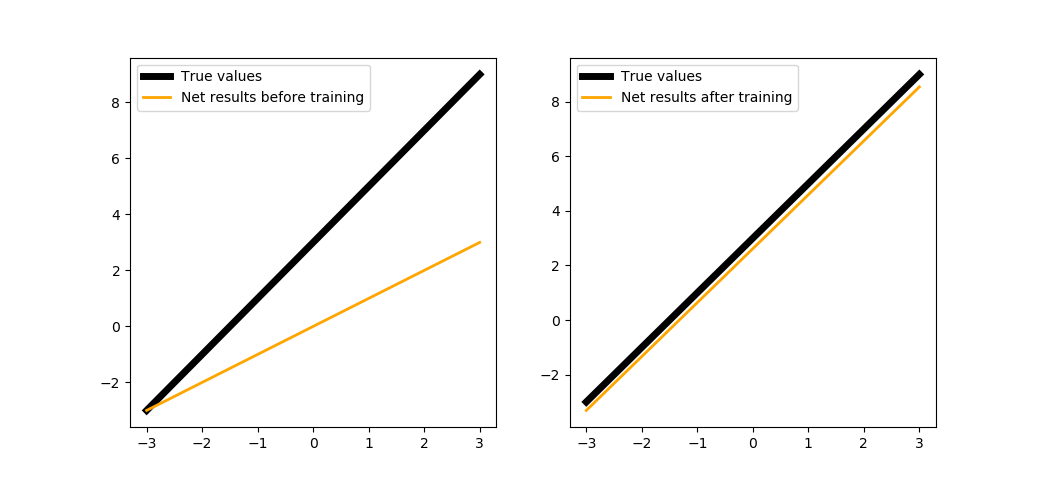
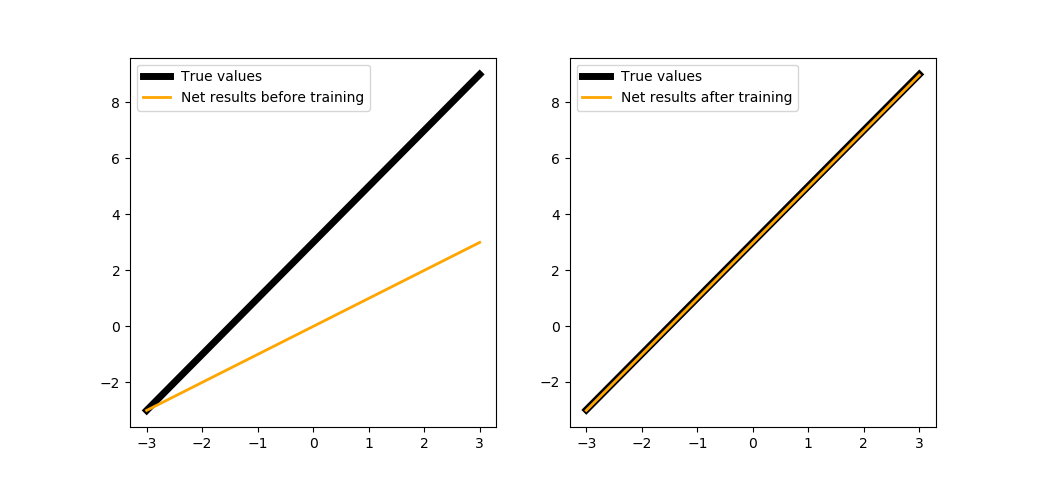
Инициализируем нейрон и покажем, какие значения по сравнению с искомой функцией он выдаёт. В данном примере обучение происходит не по батчу и не по всей выборке, а по каждому отдельно взятому объекту этой выборки:
def trainNeuron(steps=200, learnRate=1e-2):
neuron = Neuron()
predictedBT = [neuron(x) for x in X]
for i in range(steps):
idx = np.random.randint(0, 1000)
x = X[idx]
y = f(x).astype(np.float32)
neuron.optimize(x, y, learnRate)
predictedAT = [neuron(x) for x in X]
showSubplots(
X,
Y,
{
"y": predictedBT,
"name": "Net results before training",
"color": "orange"
},
{
"y": predictedAT,
"name": "Net results after training",
"color": "orange"
}
)
При запуске на 200 шагах:
trainNeuron(200)
Можем обучить нейрон чуть подольше:
trainNeuron(500)
Следующий раздел покажет, как это реализовано в PuzzleLib.
Реализация инструментами библиотеки¶
Заведём отдельную функцию, в которой обучение нашего самописного нейрона будет проходить параллельно с нейроном, сделанным инструментами библиотеки.
Для работы обучения нейрона на PuzzleLib нам понадобятся модуль линейного слоя, через который будем имитировать нейрон, оптимизатор, функцию ошибки и функцию для размещения тензоров на выбранном устройстве (как правило, GPU) to_gpu:
def trainBoth(steps=1000, learnRate=1e-2):
from PuzzleLib.Modules import Linear
from PuzzleLib.Optimizers import SGD
from PuzzleLib.Cost import MSE
from PuzzleLib.Backend.gpuarray import to_gpu
Далее объявим функцию, которая будет проводить оптимизацию нашего псевдонейрона:
def optimizeModule(module, cost, optimizer, data, target):
module.trainMode()
data = to_gpu(data.reshape(-1, 1))
target = to_gpu(target.reshape(-1, 1))
error, grad = cost(module(data), target)
print("PL module error {}".format(error))
module.zeroGradParams()
module.backward(grad, updGrad=False)
optimizer.update()
Решейп данных необходим, так как PuzzleLib предъявляет определённые требования к размерности входных данных.
Создадим псевдонейрон и заполним значения весов и смещений так, чтобы они совпадали с нашим самописным нейроном:
neuronPL = Linear(insize=1, outsize=1)
neuronPL.W.fill(1)
neuronPL.b.fill(0)
Далее инициализируем функцию ошибки и оптимизатор, а также устанавливаем последний на псевдонейрон:
cost = MSE()
optimizer = SGD(learnRate)
optimizer.setupOn(neuronPL)
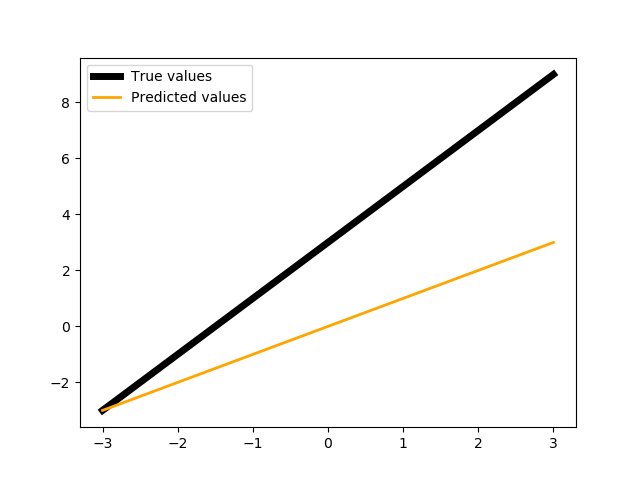
Покажем значения псевдонейрона:
show(X, Y, neuronPL(to_gpu(X)).get())
И наконец обучим оба нейрона:
for i in range(steps):
idx = np.random.randint(0, 1000)
x = X[idx]
y = f(x).astype(np.float32)
perceptron.optimize(x, y, learnRate)
cost.resetAccumulator()
optimizeModule(neuronPL, cost, optimizer, x, y)
neuronPL.evalMode()
showSubplots(
X,
Y,
{
"y": [perceptron(x) for x in X],
"name": "Neuron",
"color": "orange"
},
{
"y": neuronPL(to_gpu(X)).get(),
"name": "PuzzleLib neuron",
"color": "magenta"
}
)
trainBoth(500)
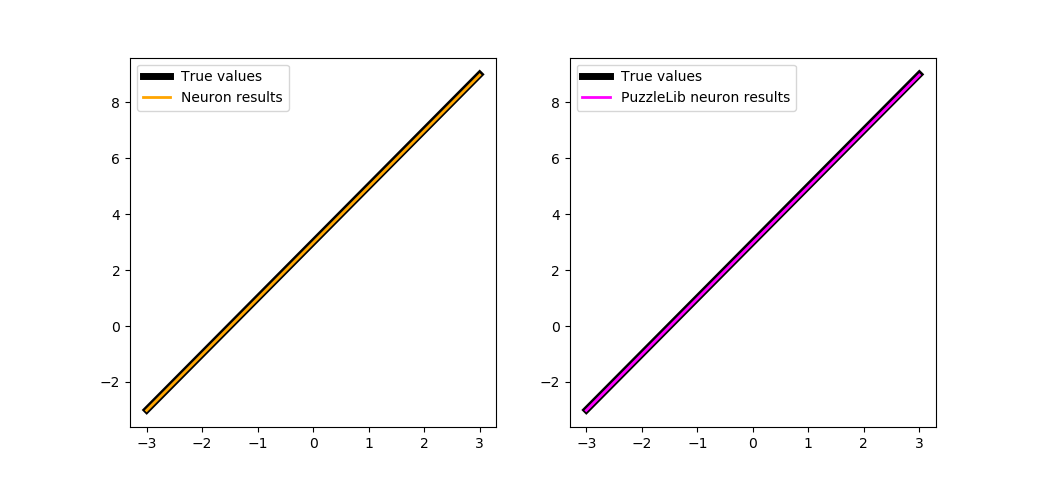
Стоит также отметить, что в библиотеке предусмотрены обработчики, которые снимают с нас необходимость вручную создавать функции подобные optimizeModule, причём в них уже предусмотрено обучение по батчам. Если переписать функцию trainBoth с использованием обработчика, то получится так:
def trainBoth(steps=1000, learnRate=1e-2):
from PuzzleLib.Modules import Linear
from PuzzleLib.Optimizers import SGD
from PuzzleLib.Cost import MSE
from PuzzleLib.Handlers import Trainer
from PuzzleLib.Backend.gpuarray import to_gpu
neuronPL = Linear(insize=1, outsize=1)
neuronPL.W.fill(1)
neuronPL.b.fill(0)
cost = MSE()
optimizer = SGD(learnRate)
optimizer.setupOn(neuronPL)
trainer = Trainer(neuronPL, cost, optimizer, batchsize=1)
perceptron = Neuron()
show(X, Y, neuronPL(to_gpu(X)).get())
for i in range(steps):
idx = np.random.randint(0, 1000)
x = X[idx]
y = f(x).astype(np.float32)
perceptron.optimize(x, y, learnRate)
trainer.trainFromHost(x.reshape(-1, 1), y.reshape(-1, 1), macroBatchSize=1,
onMacroBatchFinish=lambda train: print("PL module error: %s" % train.cost.getMeanError()))
neuronPL.evalMode()
showSubplots(
X,
Y,
{
"y": [perceptron(x) for x in X],
"name": "Neuron",
"color": "orange"
},
{
"y": neuronPL(to_gpu(X)).get(),
"name": "PuzzleLib neuron",
"color": "magenta"
}
)
Дополнительно: Роль смещения в нейроне¶
Интересно посмотреть - что будет, если убрать у нейрона параметр смещения? Перепишем методы нейрона так, чтобы исключить смещение при прямом проходе данных:
def forward(self, data):
self.inData = data
self.data = data * self.w
return self.data
trainNeuron(500)
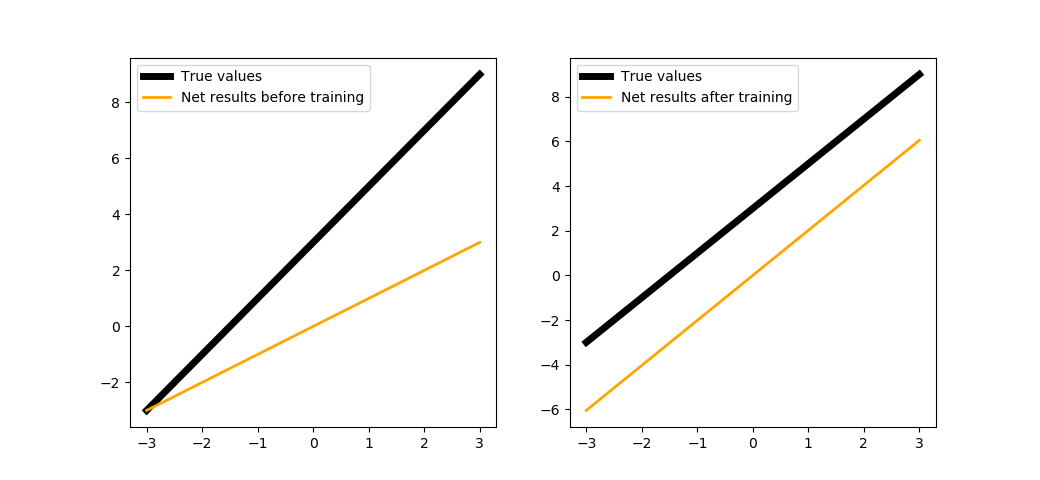
Как видите, нейрон без смещения смог выстроиться параллельно искомой функции, но для полного её восстановления ему не хватило того самого смещения.